
Fall 2022
A Mechanical Crustacean
Scroll ↓
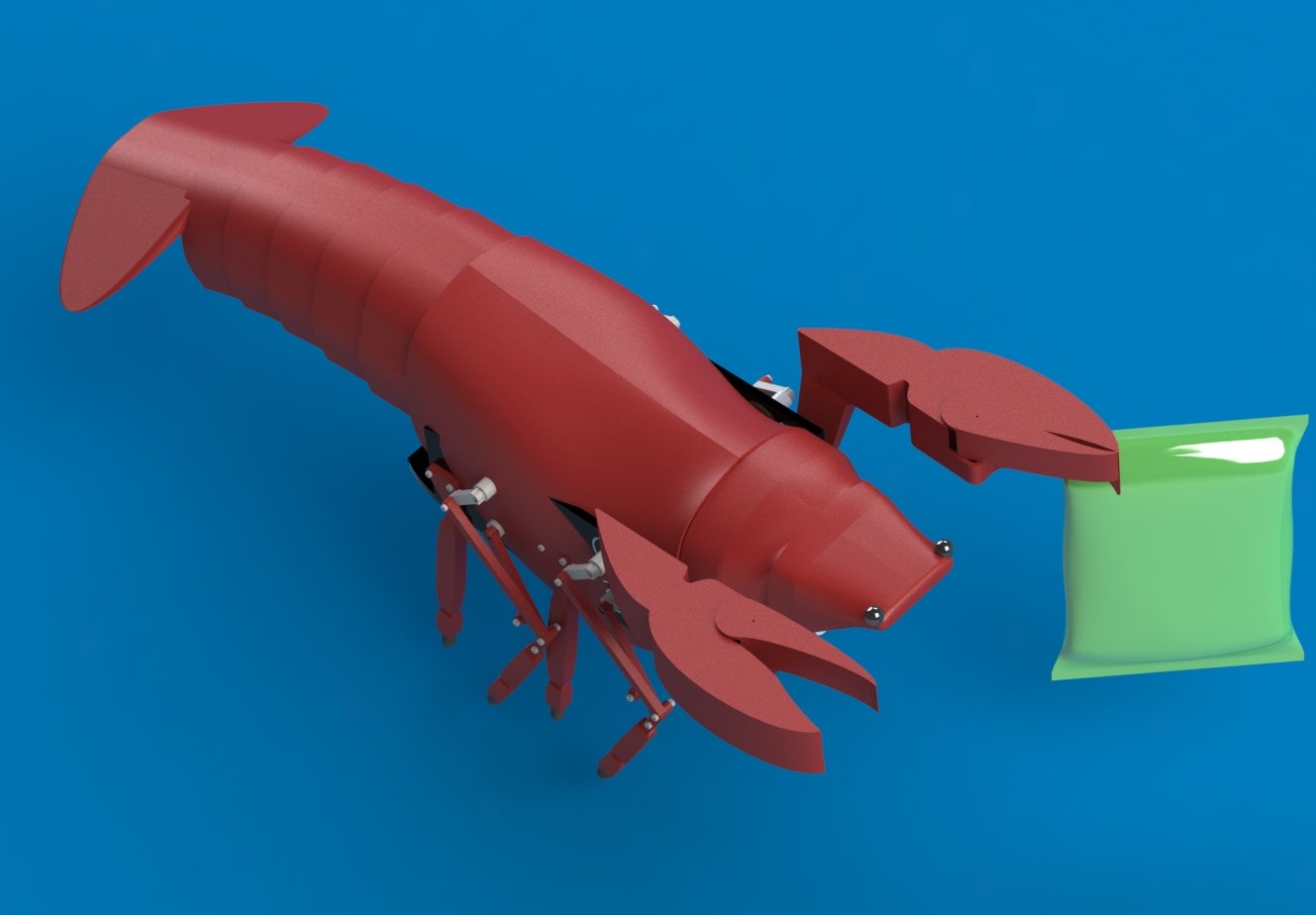
Photorealistic rendering of Lobby Bot v2.0
For my Robotics Studio class the fall of my Senior year of college, I’m working on a Lobster Robot that will be able to:
walk as fast as possible
turn, move forward and backward
grasp onto a bag of chips and deliver it to you
take video and potentially also detect human faces
To create the design, my teammate Jerry and I created several iterations of a Solidworks CAD model of the robot including over 300 precisely mated parts.

Photorealistic rendering of the motor arrangement inside the skeleton of the body

The leg linkage was first simulated to ensure it could move in the desired gait. The motor commands were generated using the keyframing method in which we interpolate the linkage angles between twelve key positions.
For the prototype, we used use eight Lewan Soul LX-16 servo motors to actuate four legs, each with two degrees of freedom. The motors are controlled by a Python code running on a Libre Le Potato computer, which replaces the now difficult to acquire Raspberry Pi. Power comes in the form of an onboard battery and power converter.
Below you can find a video demonstrating the legs taking their first steps.
This spring semester, we hope to improve the locomotion as well as add an aesthetically pleasing lobster shell on the outside to finish the project. Stay tuned for updates!

Partially assembled outer shell